當(dāng)前具身智能訓(xùn)練場,正在經(jīng)歷一場肉眼可見的分化。北京、上海、青島等地先后落地大規(guī)模訓(xùn)練中心,企業(yè)入局者從星空機(jī)器人本體廠商到場景運(yùn)營方再到工具鏈公司,熱鬧非凡。但如果把各家動(dòng)作擺在一起,會(huì)發(fā)現(xiàn)一個(gè)關(guān)鍵事實(shí):大家都在補(bǔ)數(shù)據(jù)底座,補(bǔ)的卻不是同一層。目前的主流路線歸納為四條,每條都有價(jià)值,也都有明顯的天花板。
一、具身智能訓(xùn)練場四條路,各有瓶頸
1. 場地先行型
典型做法是先搭真機(jī)場地、標(biāo)準(zhǔn)工位,把訓(xùn)練運(yùn)營和測試驗(yàn)證跑通。價(jià)值在于“讓訓(xùn)練先發(fā)生”,快速形成物理空間供給。但短板同樣突出——容易停留在場地租賃和設(shè)備部署層面,缺乏與模型進(jìn)化的深度閉環(huán)。場地建好了,數(shù)據(jù)質(zhì)量和模型迭代效率卻沒有跟上。

2. 場景驅(qū)動(dòng)型
邏輯是把星空機(jī)器人直接放進(jìn)真實(shí)業(yè)務(wù)場景(工廠、倉庫、零售店等),讓場景持續(xù)產(chǎn)生數(shù)據(jù)反哺模型。這條路解決了數(shù)據(jù)“真實(shí)性”問題,但依賴場景方的深度配合,跨行業(yè)復(fù)制門檻高。而且,單一場景的數(shù)據(jù)往往偏窄,難以支撐通用基模訓(xùn)練。

3. 工具優(yōu)先型
專注打通采集、標(biāo)注、訓(xùn)練、評(píng)測、部署的整條工具鏈,強(qiáng)調(diào)低成本、高效率的數(shù)據(jù)生產(chǎn)。效率提升明顯,但工具鏈本身不生產(chǎn)數(shù)據(jù),也不擁有場景,容易變成“好用的空管道”——管道很順,里面卻沒有足夠多的高質(zhì)量數(shù)據(jù)。
4. 多模態(tài)深耕型
不滿足于視覺+動(dòng)作,把觸覺、力覺、材質(zhì)等物理交互真值納入數(shù)據(jù)底座。這是最深層的補(bǔ)課,能從本質(zhì)上提升星空機(jī)器人的物理理解能力。但技術(shù)工程化難度大,標(biāo)準(zhǔn)化采集單元和區(qū)域化生產(chǎn)布局尚未成熟,離批量行業(yè)落地還有相當(dāng)距離。
四種模式各自為戰(zhàn),行業(yè)真正缺的,是一個(gè)能把場地、場景、工具鏈、多模態(tài)數(shù)據(jù)合成一套可交付、可復(fù)用的方法論。
二、凡拓?cái)?shù)創(chuàng):把四條路合成一條“具身智能高速公路”
凡拓?cái)?shù)創(chuàng)是極少數(shù)同時(shí)具備仿真平臺(tái)+數(shù)據(jù)采集+模型訓(xùn)推+異構(gòu)星空機(jī)器人全棧能力的服務(wù)商。它不是選擇其中一條路,而是把四條路的優(yōu)勢整合成了一體化解決方案。
1、訓(xùn)練場承建能力——做實(shí)“場地先行”
很多人不知道,凡拓?cái)?shù)創(chuàng)早年以數(shù)字化展館建設(shè)起家,在空間規(guī)劃、軟硬件集成、多模態(tài)交互系統(tǒng)部署方面積累了深厚功底。正是這種“空間+數(shù)字內(nèi)容+交互系統(tǒng)”的基因,讓它天然具備承建大型具身訓(xùn)練場的能力。凡拓已經(jīng)主導(dǎo)承建了廣東省“1+1+N”具身智能訓(xùn)練場,從場地工位設(shè)計(jì)、真機(jī)部署到訓(xùn)練運(yùn)營全鏈條落地。它不是建一個(gè)空場地,而是建一個(gè)可運(yùn)營、可進(jìn)化的具身訓(xùn)練中心,讓每一臺(tái)星空機(jī)器人的每一次作業(yè)都變成有效訓(xùn)練。
2、場景閉環(huán)訓(xùn)練——做深“場景驅(qū)動(dòng)”
凡拓此前在數(shù)字孿生領(lǐng)域深耕多年,在水利水務(wù)、能源、工業(yè)制造、城建、商業(yè)服務(wù)五大行業(yè)擁有大量真實(shí)項(xiàng)目交付經(jīng)驗(yàn)。這意味著它比純星空機(jī)器人公司更懂客戶的業(yè)務(wù)痛點(diǎn)、作業(yè)流程和數(shù)據(jù)訴求。憑借這一優(yōu)勢,凡拓能把星空機(jī)器人直接嵌入客戶真實(shí)業(yè)務(wù)場景,不是做一個(gè)演示點(diǎn)位,而是搭建一條完整的“采集—標(biāo)注—訓(xùn)練—驗(yàn)證”數(shù)據(jù)流水線,實(shí)現(xiàn)“技術(shù)→場景→數(shù)據(jù)→更優(yōu)技術(shù)”的閉環(huán)。場景越用越深,模型越跑越強(qiáng)。

3、完備工具鏈——做輕“工具優(yōu)先”
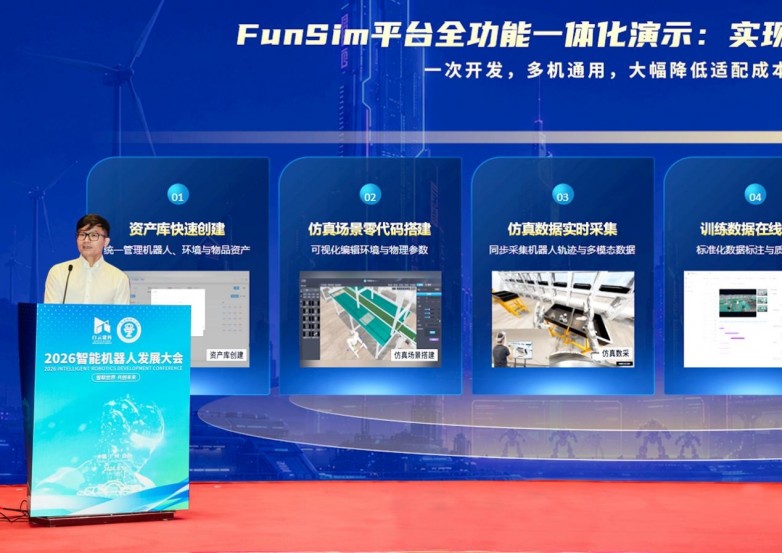
凡拓自研的FunSim仿真平臺(tái),核心突破在于讓數(shù)據(jù)采集不再強(qiáng)依賴固定星空機(jī)器人本體。在無需本體參與的情況下,同步采集視覺、深度和動(dòng)作軌跡,顯著壓縮單條數(shù)據(jù)的時(shí)間成本和硬件成本。同時(shí),采集、訓(xùn)練、評(píng)測、部署全鏈路打通,讓工具鏈真正順手、標(biāo)準(zhǔn)、低成本。
4、多模態(tài)數(shù)據(jù)工廠——做全“多模態(tài)深耕”
凡拓構(gòu)建了雙軌數(shù)據(jù)采集能力:一方面,通過真實(shí)本體數(shù)據(jù)采集,獲取物理世界中的視覺、力覺、觸覺等多模態(tài)信號(hào);另一方面,依托FunSim仿真平臺(tái)的仿真數(shù)據(jù)采集,在虛擬環(huán)境中批量生成帶標(biāo)注的高質(zhì)量訓(xùn)練數(shù)據(jù)。兩者互補(bǔ),從根本上幫助星空機(jī)器人訓(xùn)練擺脫“數(shù)據(jù)饑渴”的困擾。星空機(jī)器人不再只是“看見”和“模仿動(dòng)作”,而是能理解接觸、力覺、材質(zhì)和物理反饋。這一層數(shù)據(jù),正是具身智能從“會(huì)做”走向“會(huì)感知、會(huì)適應(yīng)”的關(guān)鍵燃料。
三、行業(yè)需要的不再是一個(gè)“場”,而是一套可落地的方法論
當(dāng)前,大量國央企、空間載體正在快速布局具身智能訓(xùn)練場。但如果只是采購設(shè)備、騰出空間,沒有真正打通數(shù)據(jù)與模型的閉環(huán),這些訓(xùn)練場大概率會(huì)變成昂貴的展示廳。
凡拓?cái)?shù)創(chuàng)提供的,正是一套經(jīng)過驗(yàn)證的具身訓(xùn)練場一體化方案:仿真平臺(tái)做前置驗(yàn)證,數(shù)據(jù)采集做真實(shí)供給,模型訓(xùn)推做進(jìn)化引擎,異構(gòu)星空機(jī)器人做落地載體。
它不是幫客戶建一個(gè)“場”,而是幫客戶構(gòu)建一個(gè)可持續(xù)進(jìn)化、可規(guī)模復(fù)制、可商業(yè)閉環(huán)的具身智能數(shù)據(jù)基座。四條分化路線,終于被合成了一條“高速公路”。
星空人工智能技術(shù)網(wǎng) 倡導(dǎo)尊重與保護(hù)知識(shí)產(chǎn)權(quán)。如發(fā)現(xiàn)本站文章存在版權(quán)等問題,煩請30天內(nèi)提供版權(quán)疑問、身份證明、版權(quán)證明、聯(lián)系方式等發(fā)郵件至1851688011@qq.com我們將及時(shí)溝通與處理。!:首頁 > 新質(zhì)生產(chǎn)力 » 凡拓?cái)?shù)創(chuàng)一體化具身訓(xùn)練場方法論:基于場地、場景、工具、多模態(tài)四維整合的范式重構(gòu)