就在幾天前,要押上一生的榮譽(yù)和成就,進(jìn)行人生最后一次創(chuàng)業(yè)的雷軍對外發(fā)布了小米SU7。就是想“交個(gè)朋友”的價(jià)格以及全棧自研的智能駕駛算法技術(shù)讓SU7“好看又能打”。

2021年,就在雷軍官宣進(jìn)軍新能源汽車的數(shù)月之后,由其創(chuàng)立的順為資本領(lǐng)投路凱智行Pre-A輪融資。路凱智行是專注于礦山場景的無人駕駛企業(yè),已實(shí)現(xiàn)L4級別無人駕駛的商業(yè)化落地。可以確定的是,小米汽車L2+級別的智能駕駛和路凱智行L4級別無人駕駛,因?yàn)閳鼍暗牟煌瑢⒏髯悦媾R不同的技術(shù)難點(diǎn)。單以無人駕駛技術(shù)而言,礦山場景下,無人駕駛在感知、定位、規(guī)劃、控制4個(gè)層面分別面臨不同的挑戰(zhàn)。
無人駕駛技術(shù)的挑戰(zhàn)
定位層面:當(dāng)前的無人駕駛系統(tǒng)需要具備較高的定位精度和系統(tǒng)魯棒性。露天礦場景下信號傳播環(huán)境復(fù)雜,且作業(yè)環(huán)境動(dòng)態(tài)變化,在傳統(tǒng)靜態(tài)RTK基站及4G\5G基站建設(shè)的基礎(chǔ)上,需增加補(bǔ)盲基站及移動(dòng)基站以保證足夠的信號覆蓋;另一方面,高精地圖為無人駕駛系統(tǒng)提供定位基線,高精地圖需動(dòng)態(tài)更新以適應(yīng)采排環(huán)境的變化。
感知層面:礦山車輛運(yùn)輸過程中或產(chǎn)生大量揚(yáng)塵,須通過前置的信號處理方法過濾相關(guān)的干擾信號,且通過AI點(diǎn)云數(shù)據(jù)聚類等算法移除揚(yáng)塵遮擋數(shù)據(jù),從而降低對障礙物的誤識(shí)別;另一方面,相比較開放道路場景下車道線、交通標(biāo)識(shí)信號燈等豐富的語義信息,礦山場景下的環(huán)境感知算法更多依賴對原始信號中的結(jié)構(gòu)化信息,從而構(gòu)建出虛擬的環(huán)境語義;在感知融合方面,顛簸的路面容易造成傳感器相對位置的偏移,需要通過在線數(shù)據(jù)標(biāo)定保持空間對齊關(guān)系。
規(guī)劃層面:露天礦采排過程中采裝區(qū)域及排土區(qū)域隨著作業(yè)進(jìn)程不斷變化,規(guī)劃算法需具備足夠的自適應(yīng)性以優(yōu)化礦山車輛在采裝區(qū)域及排土區(qū)域的整體作業(yè)效率;在多場區(qū)多編組的混合作業(yè)場景中,需設(shè)計(jì)動(dòng)態(tài)路口管控、區(qū)域管控等規(guī)劃算法保障行車安全,并通過車鏟協(xié)同動(dòng)態(tài)調(diào)度算法優(yōu)化優(yōu)化系統(tǒng)整體運(yùn)行效率。
控制層面:礦山內(nèi)部的道路環(huán)境復(fù)雜多變,存在裝載和排土等不同的場景,需要無人駕駛系統(tǒng)能夠快速響應(yīng)環(huán)境變化,做出精準(zhǔn)控制,確保行駛安全和穩(wěn)定。
為了解決礦山場景中感知方面的挑戰(zhàn),路凱智行采用以下措施:多傳感器融合:利用多種傳感器,如激光雷達(dá)、攝像頭、毫米波雷達(dá)傳感器等,對礦山無人駕駛運(yùn)行場地周圍環(huán)境進(jìn)行多角度、全方位的感知,通過融合多種傳感器數(shù)據(jù)來提高感知精度和魯棒性。多算法技術(shù)融合:采用傳統(tǒng)算法和AI model融合算法,通過場景數(shù)據(jù)的驅(qū)動(dòng),提高了對復(fù)雜環(huán)境的識(shí)別和感知能力。實(shí)時(shí)更新地圖:將傳感器數(shù)據(jù)實(shí)時(shí)更新到地圖中,利用地圖對環(huán)境進(jìn)行建模和分析,提高對環(huán)境的感知精度。同時(shí),可以將地圖與實(shí)時(shí)數(shù)據(jù)相結(jié)合,實(shí)現(xiàn)更準(zhǔn)確、更可靠的環(huán)境感知。對于定位挑戰(zhàn),通過和合作伙伴一起努力,路凱智行制定了一套標(biāo)準(zhǔn)的基礎(chǔ)設(shè)施建設(shè)流程,確保4G\5G網(wǎng)絡(luò)和RTK定位基站的穩(wěn)定服務(wù)。另外在算法層面,將多種定位技術(shù)相結(jié)合使用,如慣導(dǎo),視覺, 激光雷達(dá)等,通過融合多種定位數(shù)據(jù)來提高定位精度和魯棒性。路徑規(guī)劃方面:根據(jù)場景挑選最合適的路徑規(guī)劃算法,根據(jù)實(shí)際情況靈活規(guī)劃路徑。同時(shí),還將路徑規(guī)劃與環(huán)境感知相結(jié)合,根據(jù)實(shí)時(shí)數(shù)據(jù)動(dòng)態(tài)調(diào)整路徑規(guī)劃;控制策略方面:利用先進(jìn)的控制策略,如模型預(yù)測控制,快速響應(yīng)環(huán)境變化,做出正確的決策。同時(shí),還可以利用實(shí)時(shí)數(shù)據(jù)更新控制策略,以適應(yīng)環(huán)境變化。
AI大模型與安全策略
發(fā)布會(huì)上,雷軍提出用AI語音大模型賦能小米汽車,提升控車能力和駕駛體驗(yàn)。而實(shí)際上,路凱智行早已經(jīng)將AI大模型引入礦山無人駕駛。視覺類的AI大模型方面,在AIGC概念提出之前,路凱智行的研發(fā)團(tuán)隊(duì)已廣泛應(yīng)用生成式神經(jīng)網(wǎng)絡(luò)(GAN)等技術(shù)手段增強(qiáng)圖像、點(diǎn)云等感知數(shù)據(jù)集,用于對自動(dòng)駕駛感知算法進(jìn)行算法優(yōu)化,提升算法在更加通用的礦山場景下的準(zhǔn)確性、魯棒性和穩(wěn)定性,在路測的基礎(chǔ)上提供了低成本的算法優(yōu)化研發(fā)替代路徑。此外,類ChatGPT的語言類AI大模型方面,路凱智行已在相關(guān)領(lǐng)域布局基礎(chǔ)模型和工具鏈的研發(fā),并在礦山制度管理、低代碼數(shù)據(jù)分析等領(lǐng)域形成落地能力。在安全層面,小米汽車L2+級別的駕駛安全和路凱智行L4級別的生產(chǎn)安全,在不同維度對給自分別提出了要求。回歸到露天礦實(shí)際生產(chǎn)場景,路凱智行安全策略是從車輛安全、系統(tǒng)安全、功能安全3個(gè)維度來達(dá)成一個(gè)目標(biāo):無人駕駛系統(tǒng)異常情況下保障無人駕駛的運(yùn)輸安全。
路凱智行的系統(tǒng)軟件全部使用ISO26262功能安全流程和規(guī)范進(jìn)行正向設(shè)計(jì)和開發(fā),第三方的配件也嚴(yán)格按照功能安全的ASIL等級要求規(guī)范。對于系統(tǒng)故障或系統(tǒng)異常場景,路凱智行有著明確的定義、評判標(biāo)準(zhǔn)和評判機(jī)制。對于系統(tǒng)故障或系統(tǒng)異常發(fā)生的原因、概率和危害性,路凱智行也建立了相應(yīng)的處理機(jī)制。并通過系統(tǒng)備份、系統(tǒng)監(jiān)測、增加系統(tǒng)冗余、優(yōu)化軟件設(shè)計(jì)等方式來避免系統(tǒng)異常和系統(tǒng)故障的情況發(fā)生。
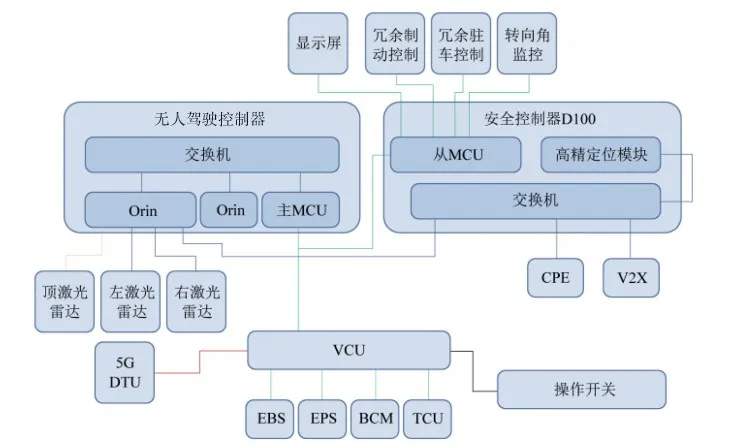
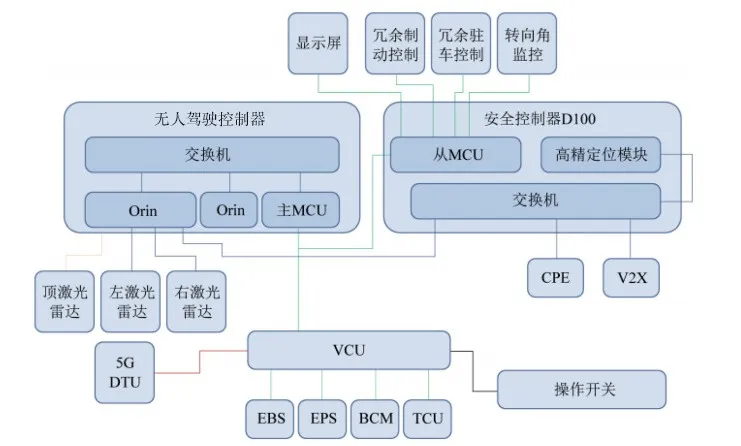
車輛方面,路凱智行的無人駕駛礦卡形成了以無人駕駛為核心的域集中式電氣架構(gòu):以VCU−ACU−SCU構(gòu)成設(shè)備與設(shè)備控制,形成安全閉環(huán);底盤線控化和安全冗余從感知、定位、通信和EE架構(gòu)到車控部件均采用安全流程正向設(shè)計(jì),且冗余控制和監(jiān)控接口均獨(dú)立于主控系統(tǒng),可在異常的情況下滿足運(yùn)輸需求。正如雷軍所言,新能源汽車已經(jīng)從電機(jī)化邁向智能化。同樣,礦山無人駕駛也已經(jīng)從“下安全員”變成了運(yùn)營效率的競爭。在這一階段,考量的不再是無人駕駛技術(shù),而是無人駕駛技術(shù)、AI大模型算法、智慧礦山系統(tǒng)、生產(chǎn)調(diào)度管理等多種技術(shù)或者系統(tǒng)方案的融合應(yīng)用。雷軍說,小米汽車力圖構(gòu)建“人、車、家”合一的互聯(lián)生態(tài),給予用戶非凡的生態(tài)體驗(yàn)。這種構(gòu)想和路凱智行從創(chuàng)立伊始就提出來的“懂車、懂礦、懂算法”存在某種意義上的不謀而合。只不過,在礦山場景下,路凱智行將其定義為線控智能整車、無人駕駛系統(tǒng)和智慧礦山系統(tǒng)的完美融合。
星空人工智能技術(shù)網(wǎng) 倡導(dǎo)尊重與保護(hù)知識(shí)產(chǎn)權(quán)。如發(fā)現(xiàn)本站文章存在版權(quán)等問題,煩請30天內(nèi)提供版權(quán)疑問、身份證明、版權(quán)證明、聯(lián)系方式等發(fā)郵件至1851688011@qq.com我們將及時(shí)溝通與處理。!:首頁 > 星空人工智能產(chǎn)業(yè) > 自動(dòng)駕駛 » SU7“人、車、家”合一的生態(tài)互聯(lián)與路凱智行“懂車、懂礦、懂算法”的不謀而合