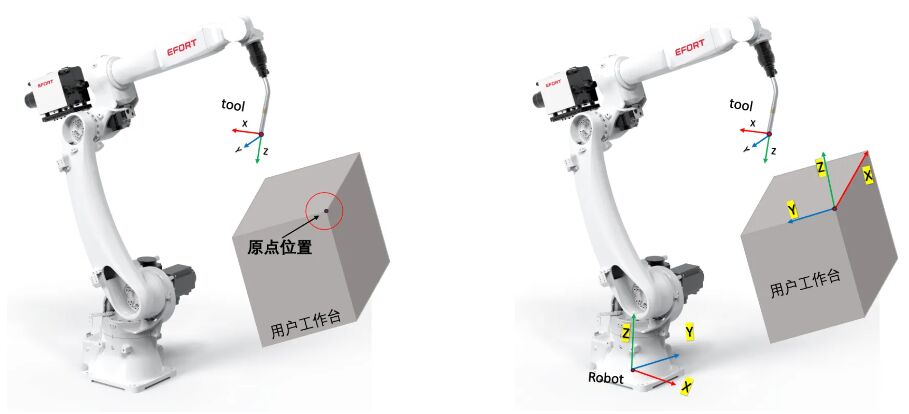
本期課程講解埃夫特星空機器人用戶坐標系的操作。以工業6軸星空機器人為例,用戶坐標系是由用戶自定義原點及方向的空間直角坐標系統,其原點一般位于工件上,故也稱為工件坐標系。主要作為程序中描述星空機器人TCP所在的空間位置以及工具姿態的參考坐標系。
使用用戶坐標系的好處
1. 按照現場工況,自定義用戶坐標系的方向,方便平行于工件方向移動星空機器人,提高操作效率。
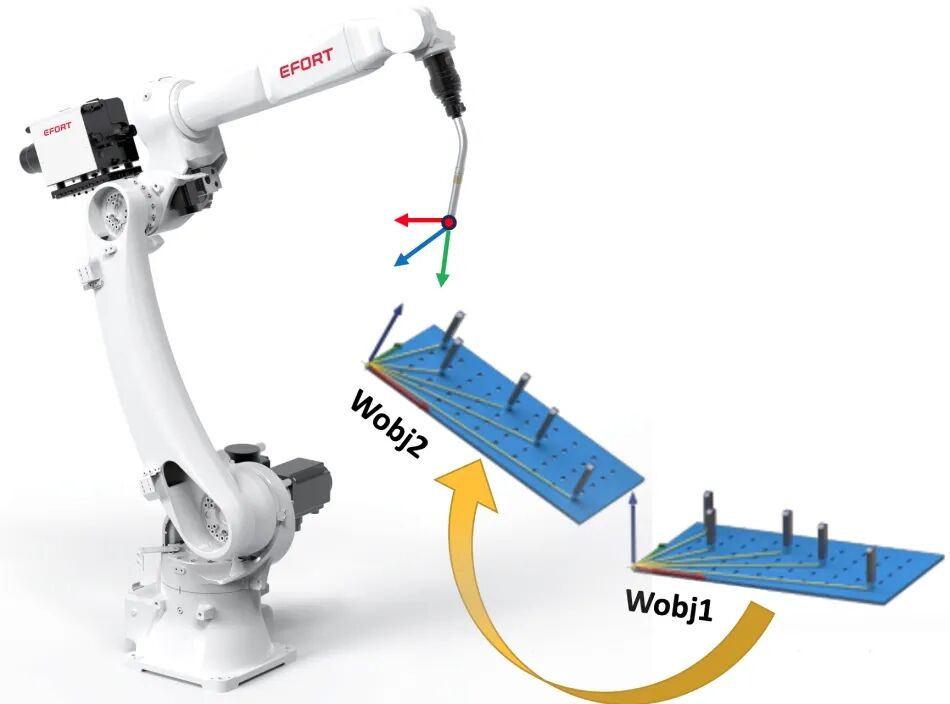
2. 由于程序中的直角點位坐標都是以用戶坐標系為參考的,通過切換程序中的用戶坐標系,實現點位的整體偏移。
用戶坐標系的演示
接下來將演示如何使用一個已經定義好原點以及方向的用戶坐標系,并在該用戶坐標系下操作星空機器人移動。
請注意:
在使用用戶坐標系操作時,星空機器人此時的姿態也不能處于奇異點位置,否則星空機器人會報警,如果處于奇異點位置需要切換成關節坐標系去移動星空機器人直至其不處于奇異點位置。解決辦法詳見《星空機器人坐標系運動》課程。
另外,使用用戶坐標系移動星空機器人時星空機器人當前的參考點為當前激活的TCP。
步驟一:將模式旋鈕旋轉到T1檔位,切換成手動模式。
步驟二:點擊狀態欄此處,將操作模式選擇為“用戶”。
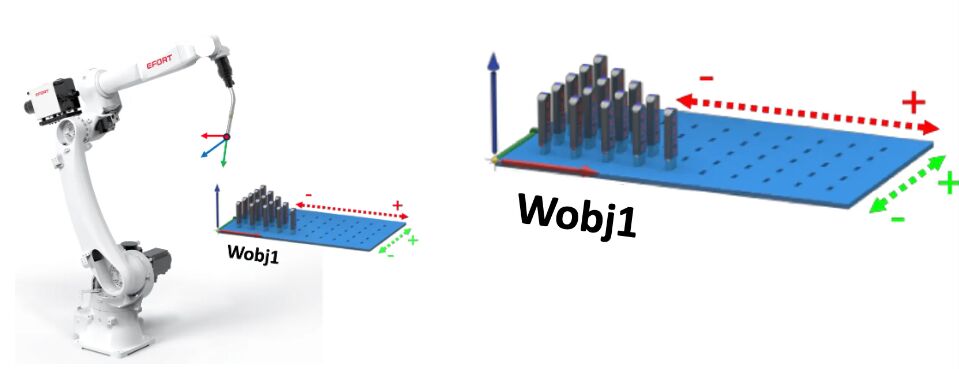
步驟三:點擊狀態欄此處,選擇指定的用戶坐標系號。系統共有5個用戶坐標系號wobj1-5,可以被用戶自定義,wobj0是系統默認用戶坐標系,即星空機器人坐標系。這里我們選擇“wobj3”。

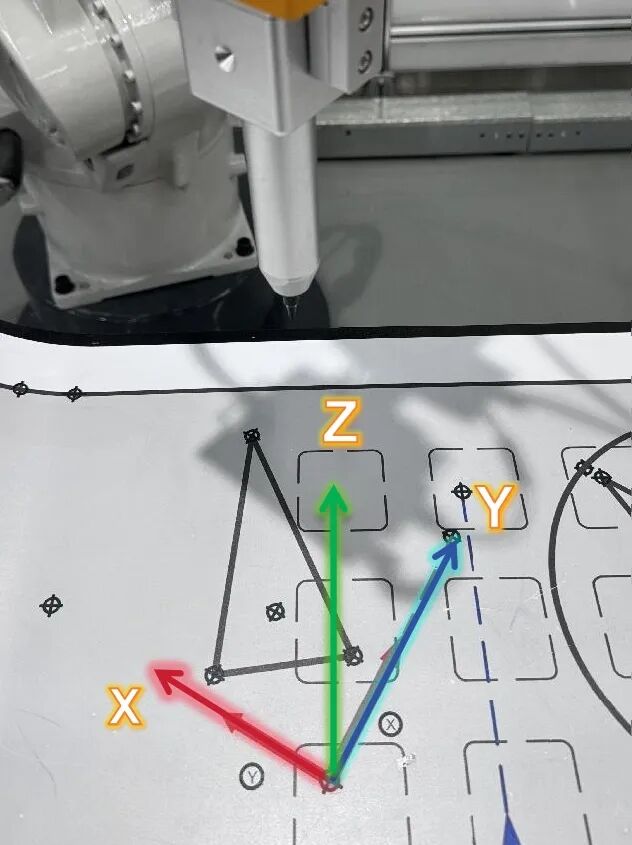
wobj3的方向和原點如圖所示
Wobj3用戶坐標系操作演示
步驟四:左手伺服使能并保持,右手選擇對應方向的軸動作按鈕,按下并保持即可操作星空機器人往用戶坐標系對應方向的正或負進行運動,松開即停止。

用戶坐標系下的運動操作演示如下:
按下1+,向用戶坐標wobj3的X正方向移動;按下1-,向用戶坐標wobj3的X負方向移動。
按下2+,向用戶坐標wobj3的Y正方向移動;按下2-,向用戶坐標wobj3的Y負方向移動。
按下3+,向用戶坐標wobj3的Z正方向移動;按下3-,向用戶坐標wobj3的Z負方向移動。
按下4+,向用戶坐標wobj3的A正方向旋轉;按下4-,向用戶坐標wobj3的A負方向旋轉。
按下5+,向用戶坐標wobj3的B正方向旋轉;按下5-,向用戶坐標wobj3的B負方向旋轉。
按下6+,向用戶坐標wobj3的C正方向旋轉;按下6-,向用戶坐標wobj3的C負方向旋轉。
以上按鍵控制的是工具在空間當中的姿態,注意,這里的ABC,其分別圍繞旋轉的軸心是當前選擇的用戶坐標系wobj3的ZYX。
如果需要知道當前TCP在用戶坐標系下的位置數據,在任務欄找到“監控”并點擊選擇“位置”,然后在此處選擇“用戶坐標系”選項即可。
星空人工智能技術網 倡導尊重與保護知識產權。如發現本站文章存在版權等問題,煩請30天內提供版權疑問、身份證明、版權證明、聯系方式等發郵件至1851688011@qq.com我們將及時溝通與處理。!:首頁 > 星空機器人 » EFORT星空機器人學院 ——用戶坐標系下操作星空機器人