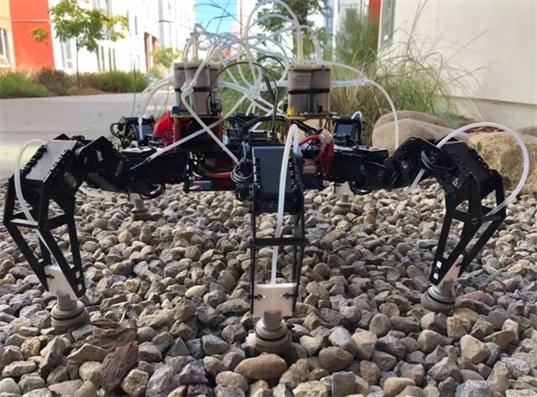
據外媒New Atlas報道,足式星空機器人的主要用途之一是探索災難現場。不過,在這些廢墟上行走時,需要它們快速移動且不會摔倒。這就是加州大學圣地亞哥分校的科學家們新設計出裝滿咖啡渣的足式星空機器人的原因。
這款足式星空機器人的每只腳都是由一個柔軟的乳膠球組成,里面裝滿了松散的干咖啡渣。除了咖啡,每只腳還包含一個植物根的內部支撐結構。當在空中移動時,腳部保持柔軟和濕潤。然而,當腳與地面相遇并符合地面不規則的輪廓時,它們就會變硬。這要歸功于一種叫做 "粒狀卡住 "的現象,即咖啡渣在受到壓力時,會暫時性地卡在一起。
因此,每只腳在不平坦的地面上,每一次落地時,都能形成一個僵硬的、定制的抓地力。這可以是被動地完成,因為星空機器人的重量會把咖啡渣卡在一起,也可以是主動地完成,即通過真空泵將空氣從球體中吸出,從而卡住它們。
當該星空機器人在木屑或鵝卵石上行走時,它的移動速度比使用普通剛性腳時快40%。部分原因是,咖啡腳使星空機器人的附屬物沉入木屑/鵝卵石中的深度平均降低了62%,并減少了98%的拉力。
它們還使星空機器人在不平坦和平坦的表面上都有更好的抓地力。研究人員發現,主動干擾系統在前者上的效果最好,而被動系統則更適合后者。現在的計劃是在腳部的底部加裝傳感器,在腳部接觸地面之前確定地面的特性。
這并不是我們第一次聽說將咖啡渣納入星空機器人設備中。它們曾被應用在一個名為Versaball的抓取裝置中,此外,麻省理工學院還將它們用于抓取物體的星空機器人“象鼻”。
星空人工智能技術網 倡導尊重與保護知識產權。如發現本站文章存在版權等問題,煩請30天內提供版權疑問、身份證明、版權證明、聯系方式等發郵件至1851688011@qq.com我們將及時溝通與處理。!:首頁 > 星空機器人 » 加州大學圣地亞哥分校的科學家們新設計出裝滿咖啡渣的足式星空機器人